Bitte ändert euer Passwort!
Im März 2026 wurde das Forum gehackt. Dabei hatten die Angreifer Zugriff auf die Datenbank und somit Zugriff auf eure Passwörter. Auch wenn das Forum kein Passwort im Klartext speichert, können die Angreifer eure Passwörter knacken. Bitte ändert daher dringend euer Passwort für das Forum. Solltet ihr das gleiche Passwort auch an anderer Stelle verwenden, ändert es bitte unbedingt an allen Stellen!
So geht es:
Anleitung Passwort ändern
DC 16 Höhenruderservos laufen nicht synchron
- MM93
- Autor
- Offline
- Junior Mitglied
-

- Beiträge: 35
- Thanks: 4
DC 16 Höhenruderservos laufen nicht synchron
12 Juli 2021 20:36ich bin der Bernd und neu hier im Forum (Umsteiger von Graupner), weil ich mir eine DC16V2 gegönnt habe.
")
Hab sie für meine Kunstflugmaschine soweit programmiert und gestern eingeflogen.
Zum Stellverhalten der Höhenruderservos hätte ich eine Frage:
Wenn ich den Höhenruderknüppel ganz langsam bewege, kann ich gut erkennen, dass das linke Höhhenruder (ist auf Kanal 3) dem rechten Höhenruder (auf Kanal 6) immer etwas vorauseilt.
D.h. das linke HR - Servo bewegt sich bevor sich das rechte HR-Servo bewegt. Die Servos sind Hitec HS7955TG an 6 V - Stromversorgung. Empfänger ist ein REX9 - neu - wie der Sender; die Servos werden direkt über den Empfänger gespeist - keine Powerbox o.ä.
Genauso verhält es sich auch beim gesetzten Mischer "Seite auf HR" für den Messerflug. Wenn ich Seite gebe, dann beginnt zuerst das linke HR-Servo zu laufen und zeitverzögert das rechte.
Hat von euch jemand schon ähnliche Erfahrungen gemacht? Kann man das evtl. per Einstellung korrigieren? Hilft hier vielleicht der "Servobalancer" (keine Ahnung, was man mit dem so alles machen kann..)?
Oder gibt es einen Workaround?
Vielen Dank schon mal im Voraus. Grüße, Bernd
Bitte Anmelden oder Registrieren um der Konversation beizutreten.
- Nicolas
-

- Offline
- Platinum Mitglied
-

- Beiträge: 1247
- Thanks: 876
Re: DC 16 Höhenruderservos laufen nicht synchron
12 Juli 2021 20:59 - 12 Juli 2021 21:14Herzlich willkommen hier im Forum!
Die Servos können ja nur gleichmäßig laufen, wenn sie exakt den gleichen Weg und Winkel fahren (Bautechnisch) und die Mitteneinstellung als auch Weg und Limit ebenfalls gleich sind.
Die andere Sache ist die Programmierung.
Ich lege immer nur Eine Funktion Höhe an, selbst wenn ich 2 HR Servos habe und füge dann ein 2tes hinzu. Also eine Funktion 2 Servos. Geht natürlich auch, wenn man es über den Assistenten macht mit 2 Funktionen also Hr1 und Hr2 also 2 Funktionen 2 Servos. Da habe ich aber festgestellt das es unter Umständen "Abweichungen" gibt.
Hoffe das hilft dir erstmal weiter.
Edit:
Wir sind auch letztes Jahr von Graupner auf Jeti umgestiegen. Jedes System hat eben seine "Unterschiede", einige Dinge funktionieren fast gleich andere komplett "anders" wobei ich mit anders, weder besser noch schlechter meine. Der Ansatz ist eben ein anderer. Beispiel QR-DIFF wenn die Ausschläge nicht begrenzt sind, fährt nicht nur das eine QR weniger nach unten, sondern das andere auch weiter nach oben, war bei Graupner anders.
Generell, finde ich Jeti, im Vergleich zur MC20, MX20 "logischer" und Variabler.
Das einzige das wir nach wie vor wie bei Graupner machen ist die Servobelegung, einfach, weil wir "fixe" Ausgänge besser finden als variable, je nachdem wie viel Klappen ein Modell hat.
Nicolas
Bitte Anmelden oder Registrieren um der Konversation beizutreten.
- MM93
- Autor
- Offline
- Junior Mitglied
-
- Beiträge: 35
- Thanks: 4
Re: DC 16 Höhenruderservos laufen nicht synchron
12 Juli 2021 22:42Erst mal Danke für deine Antwort.
Klar, mech. sollten die Servos gleich sein (Servohebel , Ruderhebelposition)..100% gibt es aber nur in der Theorie.
Was du erwähnt hast bzgl. Mitteneinstellung, Weg, Limit: ja da sind beide Servos unterschiedlich. Die Mitte liegt bei einem Servo 10% anders als beim anderen. Der Weg (Max. pos. und max. neg.) ist bei beiden gleich. Das Limit wieder um ca. 10%anders.
Aber: ist das dafür verantwortlich, dass Servo 1 früher anläuft als Servo 2? ?
Könntest du das mit dem Anlegen des 2. Servos für eine Funktion erläutern, wie die Vorgehensweise ist?
Graupner vs. Jeti: Ja jede Programmierung ist anders. Muss man sich halt daran gewöhnen. ..Wichtig finde ich halt, dass es zuverlässig funktioniert, exakt und präzise und zukunftsfähig ist.
LG. Bernd
Bitte Anmelden oder Registrieren um der Konversation beizutreten.
- GeH
-

- Offline
- Premium Mitglied
-

- Beiträge: 112
- Thanks: 60
Re: DC 16 Höhenruderservos laufen nicht synchron
12 Juli 2021 23:52mit welcher Sendefrequenz arbeitest Du -50 Hz oder 100 Hz?
Wenn noch nicht, stell einmal in den „Systemfunktionen“ unter „Senderkonfiguration“ die „100 Hz“ ein.
Weiterhin stelle dann in der „Geräteübersicht“ bei Deinem Empfänger in den „Haupteinstellungen“ die „Outputperiod“ auf „Auto“.
Benütze dann bei der „Servozuordnung“ nur die Servo-Gruppen „A“, „B“ und „C“. Stelle dabei sicher, dass beide Höhenruderservos zur gleichen Servogruppe gehören (z.B „A“).
Damit stellst Du sicher, das Du den „10ms Frame-Rate“-Modus benützt und die Ausgabe an die Höhenruderservos zur gleichen Zeit erfolgt.
Schaue dann einmal, was Deine Höhenruderservos machen. Damit solltest Du hiermit auf jeden Fall schon einmal eine mögliche Fehlerquelle ausschalten.
Gruß
Gerhard
Gerhard
Bitte Anmelden oder Registrieren um der Konversation beizutreten.
- Nicolas
-
- Offline
- Platinum Mitglied
-
- Beiträge: 1247
- Thanks: 876
Re: DC 16 Höhenruderservos laufen nicht synchron
12 Juli 2021 23:54 - 13 Juli 2021 01:01MM93 wrote: ...
Könntest du das mit dem Anlegen des 2. Servos für eine Funktion erläutern, wie die Vorgehensweise ist?
Hallo Bernd!
Klar, kann ich.
Wenn du bei Jeti ein neues Modell anlegst und anstelle von 1HR, 2HR (2HR Ailvator) auswählst,
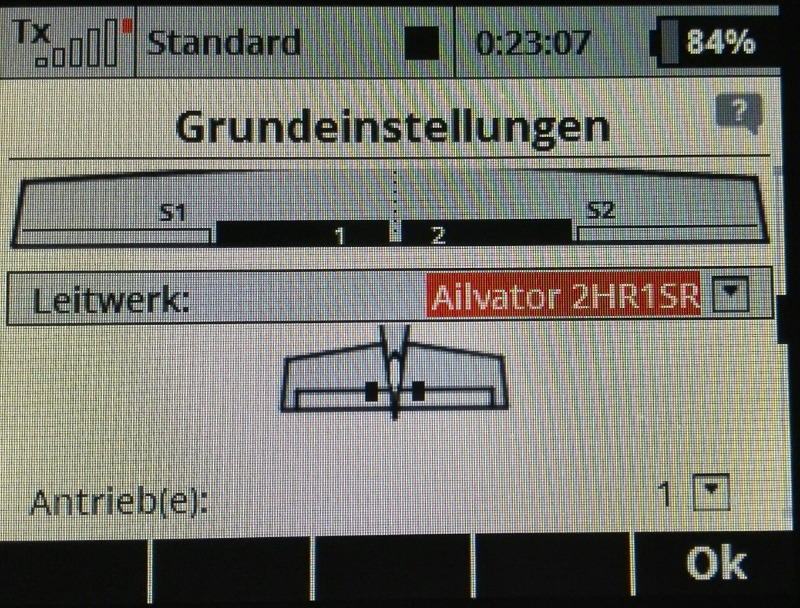
kann es zu Komplikationen kommen, wie die von dir erwähnten. Wäre also die Falsche Auswahl.
Wenn du ein geteiltes HR hast welches via 2 Servos angesteuert wird, legst du ein neues Modell mit 1. HR an, und in der Servozuordnung einen 2ten Kanal (in meinem Beispiel K8 an den du das 2te HR Servo anschließt), dem du als Funktion ebenfalls Höhe zuweißt.
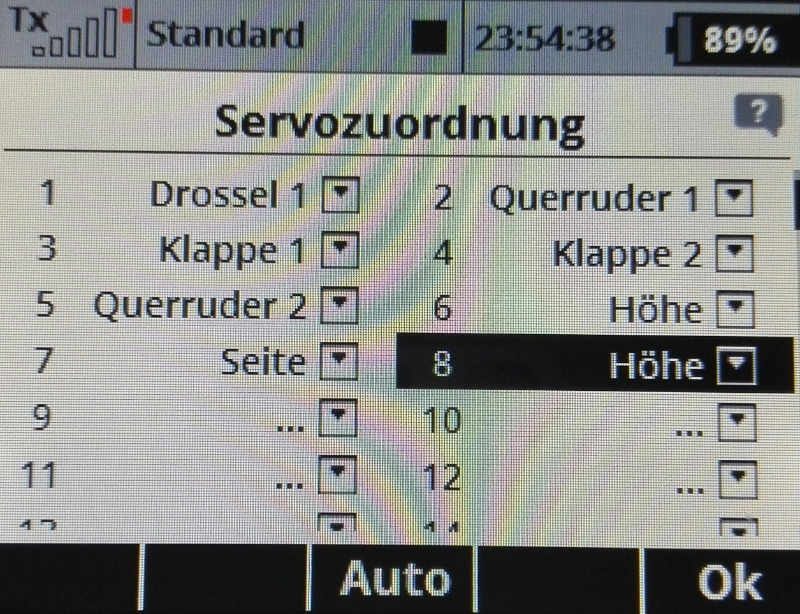
Dann sollten beide Servos synchron laufen.
Falls nicht, mußt du das über den Servobalancer Regeln, gerade wenn der Fall, 2 Servos an einer Steuerfläche gegeben ist. Solche Probleme entstehen meistens, wenn die Servogestänge der beiden Servos bei 1500 nicht genau im gleichen Winkel stehen, unterschiedliche Ausschläge aufgrund der Rotation/Stellung des Servos.
Servobalancer, mußte ich bei 2 teiligem Höhenruder, allerdings noch nie anwenden.
Komisch ist eben, das ein Servo früher läuft, das hatte ich nur als ich Anfangs Mal aus Unwissenheit 2HR Ailvator auswählte.
Hoffe das hilft dir weiter.
Nicolas
Bitte Anmelden oder Registrieren um der Konversation beizutreten.
- Nicolas
-
- Offline
- Platinum Mitglied
-
- Beiträge: 1247
- Thanks: 876
Re: DC 16 Höhenruderservos laufen nicht synchron
13 Juli 2021 00:11 - 13 Juli 2021 00:38GeH wrote: Hallo Bernd,
mit welcher Sendefrequenz arbeitest Du -50 Hz oder 100 Hz?
Wenn noch nicht, stell einmal in den „Systemfunktionen“ unter „Senderkonfiguration“ die „100 Hz“ ein.
Weiterhin stelle dann in der „Geräteübersicht“ bei Deinem Empfänger in den „Haupteinstellungen“ die „Outputperiod“ auf „Auto“.
Benütze dann bei der „Servozuordnung“ nur die Servo-Gruppen „A“, „B“ und „C“. Stelle dabei sicher, dass beide Höhenruderservos zur gleichen Servogruppe gehören (z.B „A“).
Damit stellst Du sicher, das Du den „10ms Frame-Rate“-Modus benützt und die Ausgabe an die Höhenruderservos zur gleichen Zeit erfolgt.
Schaue dann einmal, was Deine Höhenruderservos machen. Damit solltest Du hiermit auf jeden Fall schon einmal eine mögliche Fehlerquelle ausschalten.
Gruß
Gerhard
Hallo Gerhard!
Meine persönliche Meinung...
So einen Tipp zu geben, ohne sicher zu sein, daß die Servos 10ms "können", ist unter, Umständen wenn es schlecht läuft, fatal.
Gerade wenn man nicht weiß ob nicht noch andere Servos im Modell verbaut sind, welche u.U. die 10ms nicht verkraften.
Zu den 7955tg Servos fand ich bei keinem Händler, noch bei MPX oder hitec, eine Aussage bzgl. des Timings.
Siehe hier
Falls du aus eigener Erfahrung oder dir vorliegenden Information weißt, daß die HS7955tg, 10ms "ab können" und damit auch auf lange Sicht gut funktionieren, ist das natürlich was anderes.
Nachsehen ob beide HR Servos in der gleichen Gruppe sind ist ein guter Tipp.
Nicolas
Bitte Anmelden oder Registrieren um der Konversation beizutreten.