Bitte ändert euer Passwort!
Im März 2026 wurde das Forum gehackt. Dabei hatten die Angreifer Zugriff auf die Datenbank und somit Zugriff auf eure Passwörter. Auch wenn das Forum kein Passwort im Klartext speichert, können die Angreifer eure Passwörter knacken. Bitte ändert daher dringend euer Passwort für das Forum. Solltet ihr das gleiche Passwort auch an anderer Stelle verwenden, ändert es bitte unbedingt an allen Stellen!
So geht es:
Anleitung Passwort ändern
2*REX 12 for full house (18 servo) glider?
- ClausT
- Autor
- Offline
- Senior Mitglied
-

- Beiträge: 61
- Thanks: 39
2*REX 12 for full house (18 servo) glider?
10 Jan. 2016 00:49 - 10 Jan. 2016 00:50
I am planning to upgrade my 1:2.3 DG303 from dual ACT receivers to Jeti WHAT????
Central Box 400 is the easy answer, but not a direct match
1. No voltage regulation needed, dual A123 packs in place and servos are up to it.
2. Wire length, currently each receiver is placed at the wing root each side of the fuselage, for central box a lot of extensions will be needed.
3. All power supply wires are more or less common, making the central box single output protection obsolete, needs to be implemented between each servo and the common supply.
First solution was to go with a R18+RSAT2
Seemed ok, but also maxed out. Wire lengths would be an issue here and actually only 17 servo outputs with the RSAT in use.
Also need to connect at least my WStech LinkVario and maybe one more telemetry sensor, seems like I will be short on available IO ports.
Second solution 2*REX12
Lots of servo connections, check OK.
Multiple sensors attached (at least 2), check OK.
Full redundancy, check OK, or ???
I haven't managed to find an up to date description of the different high availability setups actually possible.
Double path, fine, SAT receivers, fine.. but a diagram showing the actual diversity/redundancy in the different combinations, can't find it.
I am probably worrying to much, but in my professional line of work I see a lot of dual/dual/dual/dual everything setups that still have a single point of failure. In my hobby I accept being the single point of failure, aka the pilot :lol:
Hope some of you experienced Jeti users can shed some light on this.
Central Box 400 is the easy answer, but not a direct match
1. No voltage regulation needed, dual A123 packs in place and servos are up to it.
2. Wire length, currently each receiver is placed at the wing root each side of the fuselage, for central box a lot of extensions will be needed.
3. All power supply wires are more or less common, making the central box single output protection obsolete, needs to be implemented between each servo and the common supply.
First solution was to go with a R18+RSAT2
Seemed ok, but also maxed out. Wire lengths would be an issue here and actually only 17 servo outputs with the RSAT in use.
Also need to connect at least my WStech LinkVario and maybe one more telemetry sensor, seems like I will be short on available IO ports.
Second solution 2*REX12
Lots of servo connections, check OK.
Multiple sensors attached (at least 2), check OK.
Full redundancy, check OK, or ???
I haven't managed to find an up to date description of the different high availability setups actually possible.
Double path, fine, SAT receivers, fine.. but a diagram showing the actual diversity/redundancy in the different combinations, can't find it.
I am probably worrying to much, but in my professional line of work I see a lot of dual/dual/dual/dual everything setups that still have a single point of failure. In my hobby I accept being the single point of failure, aka the pilot :lol:
Hope some of you experienced Jeti users can shed some light on this.
Letzte Änderung: 10 Jan. 2016 00:50 von ClausT.
Bitte Anmelden oder Registrieren um der Konversation beizutreten.
- ClausT
- Autor
- Offline
- Senior Mitglied
-
- Beiträge: 61
- Thanks: 39
Re: 2*REX 12 for full house (18 servo) glider?
04 Juli 2016 22:33 - 04 Juli 2016 22:45
Ok, solved it.
Have been following other threads about similar configurations, and first really helpful response was about whether to use PPM or EX BUS.
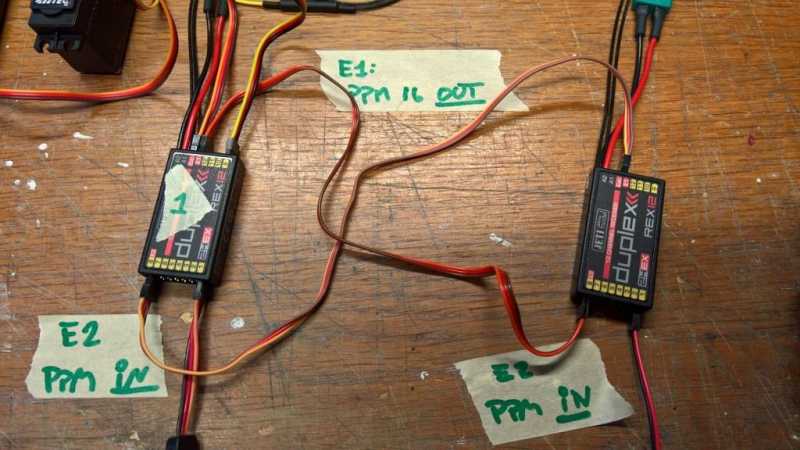
This gives the following setup on both receivers:
E1 is setup for PPM Out (16 channels)
E2 is setup for PPM In (16 channels)
E1 on the first receiver is connected to E2 on the second receiver, and vice versa

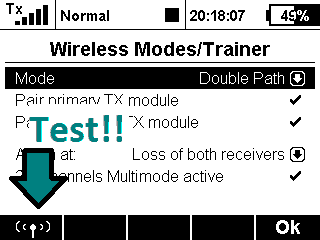
How to test the redundancy? I haven't found the description here on JetiForum, only answers like
Found it by accident, and I can now see it is described in the manual under the "Drahtlosmodus/Trainer" description, just a few pages before the zwei wege/dual path description... don't just read the manual, read the ENTIRE manual seems to be the answer here.
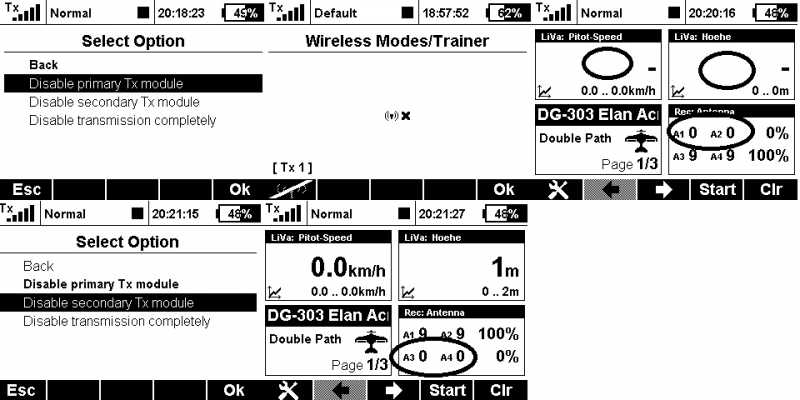
Anyway, being able to disable each TX module at a time, allows for some proper testing.
Disable TX1 and see the RX1 antenna values drop to zero, servo connected to RX1 still working as it is getting signal from RX2. To verify disconnect cable from RX2 to RX1, servo stops responding. OK!
Repeat with opposite scenario, turn off TX2 etc... OK
Things 'missing' compared to a CB200/400
Channels 17-24 are not redundant, but I can live with that, will use them for 'near' range functions e.g. like wheelbrake.
Telemetry isn't redundant, e.g. LinkVario on RX1 will not get through if RX1 is out of range.
No fuses on each output (which I can't use anyway as wiring is done with common plus/minus).
Concept tested and ready for installation in DG-303 as replacement for dual ACT receivers (and outdated transmitter..)

Have been following other threads about similar configurations, and first really helpful response was about whether to use PPM or EX BUS.
uwe neesen wrote: 2 empfänger können nicht (!) über ex bus gekoppelt werden. man muss ppm verwenden.
This gives the following setup on both receivers:
E1 is setup for PPM Out (16 channels)
E2 is setup for PPM In (16 channels)
E1 on the first receiver is connected to E2 on the second receiver, and vice versa
How to test the redundancy? I haven't found the description here on JetiForum, only answers like
Exactly what bothers me, not being able to test it.HNAGL wrote: Du kannst wohl den RSAT2 und den R18ex auf EX-BUS-Signal stellen, nur man kann es nicht überprüfen...
Found it by accident, and I can now see it is described in the manual under the "Drahtlosmodus/Trainer" description, just a few pages before the zwei wege/dual path description... don't just read the manual, read the ENTIRE manual seems to be the answer here.
Anyway, being able to disable each TX module at a time, allows for some proper testing.
Disable TX1 and see the RX1 antenna values drop to zero, servo connected to RX1 still working as it is getting signal from RX2. To verify disconnect cable from RX2 to RX1, servo stops responding. OK!
Repeat with opposite scenario, turn off TX2 etc... OK
Things 'missing' compared to a CB200/400
Channels 17-24 are not redundant, but I can live with that, will use them for 'near' range functions e.g. like wheelbrake.
Telemetry isn't redundant, e.g. LinkVario on RX1 will not get through if RX1 is out of range.
No fuses on each output (which I can't use anyway as wiring is done with common plus/minus).
Concept tested and ready for installation in DG-303 as replacement for dual ACT receivers (and outdated transmitter..)
Letzte Änderung: 04 Juli 2016 22:45 von ClausT. Begründung: bilder einfügen
Bitte Anmelden oder Registrieren um der Konversation beizutreten.
- ClausT
- Autor
- Offline
- Senior Mitglied
-
- Beiträge: 61
- Thanks: 39
Re: 2*REX 12 for full house (18 servo) glider?
04 Juli 2016 22:42 - 04 Juli 2016 22:43
Missing picture for the testing part

Letzte Änderung: 04 Juli 2016 22:43 von ClausT.
Bitte Anmelden oder Registrieren um der Konversation beizutreten.
Ladezeit der Seite: 0.584 Sekunden