Bitte ändert euer Passwort!
Im März 2026 wurde das Forum gehackt. Dabei hatten die Angreifer Zugriff auf die Datenbank und somit Zugriff auf eure Passwörter. Auch wenn das Forum kein Passwort im Klartext speichert, können die Angreifer eure Passwörter knacken. Bitte ändert daher dringend euer Passwort für das Forum. Solltet ihr das gleiche Passwort auch an anderer Stelle verwenden, ändert es bitte unbedingt an allen Stellen!
So geht es:
Anleitung Passwort ändern
Interactive fail safe settings
- onki
-
 Autor
Autor
- Offline
- Platinum Mitglied
-

- Beiträge: 2286
- Thanks: 791
Interactive fail safe settings
17 Dez. 2014 09:33
Hi Jeti,
setting up fail safe positions is a kind of nightmerfa using the provided functions.
I wish there was a more interactive way to setup the positions.
basically we need to differentiate between a hold and a preset position.
To get this done in a second I would recommend the following process:
- Enter the failsafe option (in the device manager)
- Click on "set fail safe position" (might be a new function) The microprocessor should now record all servo positions when the button is pressed.
- Move the sticks to the desired position and click on a button labelled "Store" (or similar). Now the µC should compare the before / after positions of each channel. If the deviation is less than 2% (or similar) the channel should remain in "hold" mode. In case the deviation is bigger use the final position as new fail safe position.
I think if you add this feature more people would work with fail safe position. At the moment it is just too complicated to handle that properly. Just imagine a glider with 8 flaps and "Butterfly" as failsafe postion. A nightmare to setup (including elevator correction). Just a second with the suggested procedure.
Best regards, Merry Christmas and a sucessful and healthy 2015
Onki
setting up fail safe positions is a kind of nightmerfa using the provided functions.
I wish there was a more interactive way to setup the positions.
basically we need to differentiate between a hold and a preset position.
To get this done in a second I would recommend the following process:
- Enter the failsafe option (in the device manager)
- Click on "set fail safe position" (might be a new function) The microprocessor should now record all servo positions when the button is pressed.
- Move the sticks to the desired position and click on a button labelled "Store" (or similar). Now the µC should compare the before / after positions of each channel. If the deviation is less than 2% (or similar) the channel should remain in "hold" mode. In case the deviation is bigger use the final position as new fail safe position.
I think if you add this feature more people would work with fail safe position. At the moment it is just too complicated to handle that properly. Just imagine a glider with 8 flaps and "Butterfly" as failsafe postion. A nightmare to setup (including elevator correction). Just a second with the suggested procedure.
Best regards, Merry Christmas and a sucessful and healthy 2015
Onki
Gruß aus dem Nordschwarzwald
Rainer aka Onki
www.onki.de
gepostet unter Verwendung von 100% recycelter Elektronen.
Rainer aka Onki
www.onki.de
gepostet unter Verwendung von 100% recycelter Elektronen.
Dieses Thema wurde gesperrt.
- Sairaghi
- Offline
- Neues Mitglied
-

- Beiträge: 8
- Thanks: 1
Dieses Thema wurde gesperrt.
- Sascha Haber
-

- Offline
- Platinum Mitglied
-
- Beiträge: 1474
- Thanks: 241
Dieses Thema wurde gesperrt.
- uwe neesen
-

- Offline
- Moderator
-

- Beiträge: 1989
- Thanks: 2361
Re: Re:Interactive fail safe settings
17 Dez. 2014 15:59 - 17 Dez. 2014 16:03
Is already done!
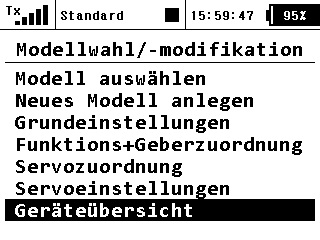
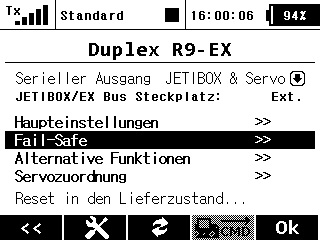
Mit aktueller SW (Sender + Empfänger) kann man doch längst die Failsafepositionen auf einen Knopfdruck übertragen und dann den einzelnen Kanälen sagen "Failsafe oder hold...". Das wird in der Geräteübersicht gemacht.
Mit aktueller SW (Sender + Empfänger) kann man doch längst die Failsafepositionen auf einen Knopfdruck übertragen und dann den einzelnen Kanälen sagen "Failsafe oder hold...". Das wird in der Geräteübersicht gemacht.
viele Grüße, Uwe
BITTE keine PN, Anfragen immer per Mail an info@hacker-motor.com So lassen sich Links und Anhänge, Tipps und Tricks besser und einfacher weitergeben.
Hacker Factory-team
BITTE keine PN, Anfragen immer per Mail an info@hacker-motor.com So lassen sich Links und Anhänge, Tipps und Tricks besser und einfacher weitergeben.
Hacker Factory-team
Letzte Änderung: 17 Dez. 2014 16:03 von uwe neesen.
Folgende Benutzer bedankten sich: puf3a
Dieses Thema wurde gesperrt.
- PW
-

- Offline
- Moderator
-
- Beiträge: 9925
- Thanks: 3926
Re: Re:Interactive fail safe settings
17 Dez. 2014 16:03
Hallo Uwe,
genauso ist es")
Onki:
Do you mean something different ?
Regards
PW
genauso ist es
Onki:
Do you mean something different ?
Regards
PW
Rechtsbeistand u.a. bei "Modellflugproblemen"etc. : Rechtsanwälte Wessels & Partner, Tel.: 02362/27065
PW Modellbautechnik ( Jeti Kombiangebote, Beratung/Einstellservice etc.)
PW Modellbautechnik ( Jeti Kombiangebote, Beratung/Einstellservice etc.)
Folgende Benutzer bedankten sich: puf3a
Dieses Thema wurde gesperrt.
- uwe neesen
-
- Offline
- Moderator
-
- Beiträge: 1989
- Thanks: 2361
Re: Re:Interactive fail safe settings
17 Dez. 2014 16:07 - 17 Dez. 2014 16:12
hier die Screenshots:

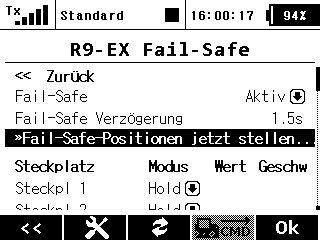
Knüppel in FS-Position halten:
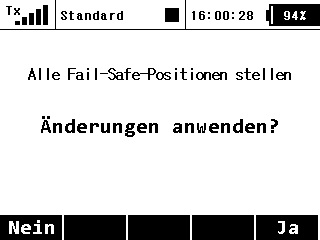

Knüppel in FS-Position halten:
viele Grüße, Uwe
BITTE keine PN, Anfragen immer per Mail an info@hacker-motor.com So lassen sich Links und Anhänge, Tipps und Tricks besser und einfacher weitergeben.
Hacker Factory-team
BITTE keine PN, Anfragen immer per Mail an info@hacker-motor.com So lassen sich Links und Anhänge, Tipps und Tricks besser und einfacher weitergeben.
Hacker Factory-team
Letzte Änderung: 17 Dez. 2014 16:12 von uwe neesen.
Folgende Benutzer bedankten sich: puf3a
Dieses Thema wurde gesperrt.
Ladezeit der Seite: 0.638 Sekunden