Bitte ändert euer Passwort!
Im März 2026 wurde das Forum gehackt. Dabei hatten die Angreifer Zugriff auf die Datenbank und somit Zugriff auf eure Passwörter. Auch wenn das Forum kein Passwort im Klartext speichert, können die Angreifer eure Passwörter knacken. Bitte ändert daher dringend euer Passwort für das Forum. Solltet ihr das gleiche Passwort auch an anderer Stelle verwenden, ändert es bitte unbedingt an allen Stellen!
So geht es:
Anleitung Passwort ändern
Kalibrierung teils verkehrt herum
- skyfreak
- Offline
- Platinum Mitglied
-

- Beiträge: 2947
- Thanks: 1450
Re: ungewöhnliches Verhalten des Assist im Kreiselmode beim Gasgeben
21 Aug. 2020 22:44 - 21 Aug. 2020 22:44www.jetiforum.de/index.php/rex6-assist-r...-steigton-bei-sinken
speziell die posts am ende von gerd giese
irgendwie habe ich das gefühl, dass wirklich der beschleunigungssensor echten murks macht
nicht nur beim kreiseln sondern auch beim vario
gruss
guido
GUIDO
_________________________________________________________
Too many dicks on the dance floor.
Too many dicks!
Bitte Anmelden oder Registrieren um der Konversation beizutreten.
- Peka
- Offline
- Elite Mitglied
-

- Beiträge: 183
- Thanks: 30
Re: ungewöhnliches Verhalten des Assist im Kreiselmode beim Gasgeben
22 Aug. 2020 11:08 - 22 Aug. 2020 11:08Für mich ein reines Softwareproblem.
Peter
Bitte Anmelden oder Registrieren um der Konversation beizutreten.
- skyfreak
- Offline
- Platinum Mitglied
-
- Beiträge: 2947
- Thanks: 1450
Re: ungewöhnliches Verhalten des Assist im Kreiselmode beim Gasgeben
22 Aug. 2020 11:15 - 22 Aug. 2020 11:16da stimmt irgendwas nicht mit dem code und ich vermute dass es mit dem codeteil des beschleunigungssensor zusammen hängt
gruss
guido
GUIDO
_________________________________________________________
Too many dicks on the dance floor.
Too many dicks!
Bitte Anmelden oder Registrieren um der Konversation beizutreten.
- Knut
-

- Offline
- Platinum Mitglied
-
- Beiträge: 702
- Thanks: 313
Re: ungewöhnliches Verhalten des Assist im Kreiselmode beim Gasgeben
22 Aug. 2020 12:12 - 22 Aug. 2020 12:19Peka wrote: Und warum geht dann der gleiche Beschleunigungssensor bei der 1.09 korrekt?
Für mich ein reines Softwareproblem.
Klar ist das ein Sw Problem. Da hatte ich zuletzt nie einen Zweifel daran.
Der Beschleunigungsensor wird genauso funktionieren wie bei der 1.09.
oder davor. Die Frage ist eher, in welchen Regelkreis, auch gegenüber der 1.09. der nun noch eingebunden ist.
Guido hakt ja mächtig bei Jeti nach und lässt sich auch nicht mit Irgendwas abspeisen. Egal wie die Sache ausgehtt,
am Ende muss jeder Nutzer seine eigenen Schlüsse daraus ziehen. Ob die nun richtig oder falsch sind, spielt keine Rolle. Am Ende zählt nur das Ergebnis.
Funktioniert oder nicht. Brauche ich das oder nicht.
Tschüß
Knut
Bitte Anmelden oder Registrieren um der Konversation beizutreten.
- skyfreak
- Offline
- Platinum Mitglied
-
- Beiträge: 2947
- Thanks: 1450
Re: ungewöhnliches Verhalten des Assist im Kreiselmode beim Gasgeben
22 Aug. 2020 15:10 - 22 Aug. 2020 15:16habe meinen versuchsaufbau etwas erweitert und bitte um euer kommentare/einschätzungen dazu
passt das so oder mache ich einen denkfehler bzw habe einen fehler in meinem aufbau ???
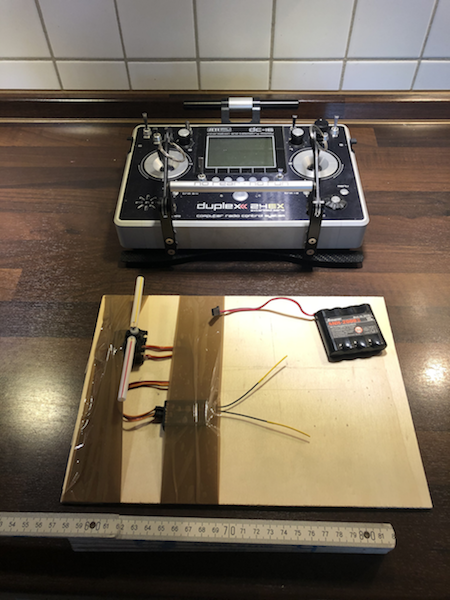
also ein brettchen auf dem sowohl die 2 servos als auch der assist fixiert sind
das ganze liegt plan auf unserer küchenzeile und die ist lt. 1m langer wasserwaage absolut im lot
das modell ist konfiguriert mit 2 HR und die beiden servos sollen das simulieren
der assist ist zunächst noch mal mit der FW1.12 ugedated worden und dann vor der konfiguration auch noch mal per "reset to factory default" in den lieferzustand zurück gesetzt worden
der pfeil auf dem assist geht von rechts nach links und so ist das modell auch konfiguriert, sprich liegend in flugrichtung
diese wäre also auf dem bild von rechts nach links
der gewählte modelltyp im assist ist standard-modell und die werte für dämpfung und halten habe ich verdoppelt, damit man auch bisi was an ausschlägen sieht
mode1 OFF
mode2 HORIZONT
mode3 HH
wenn ich das brettchen rechts anhebe simuliere ich nase runter und die HR gehen auf höhe
und umgekehrt ebenso, links anheben simuliert nase geht hoch und die HR gehen auf tiefe
wirktest passt - check
dann habe ich auf das display die telemtrieanzeige ASSIST-NICK gelegt, in ruhe stehen da positiv 0.2°
unten im bild sieht man einen zollstock der auf höhe des assist 60cm anzeigt
wenn ich jetzt das brettchen von rechts nach links (also vorwärts flug) um nur 60cm schiebe, habe ich im vibrationsmonitor fast keine ausschläge aber der nickwert geht bei diesen wenigen 60cm schieben schon auf knapp 5° positiv
was bedeutet irgendwas misst und denkt der assist wäre 5° mit der nase nach oben
parallel dazu bewegen sich beim schieben die HR ganz leicht auf tiefe
das ganze geschieht nur sehr kurz aufgrund des kurzen weges
im übrigen beim zurück schieben links nach rechts selbes spiel, nickwert zeigt dann eben negative werte
wenn ihr kritik/anregungen zu dem aufbau habt nur her damit bitte
die tage werde ich versuchen mit einem kollegen und gopro davon ein video zu machen
ich stelle mir vor das ganze zu loggen und mit einem auto auf einer strecke von 600-800m zügig auf 80 kmh zu beschleunigen und dann die geschwindigkeit zu halten
das ganze 1x mit eingeschaltetem vibrationsmonitor und 1x mit dem dem nick tellemetrie wert
ich erhoffe mir davon, dass man auf dem video deutlich sehen kann, dass die vibrationen minimal sind und die servos aber bei horizontalem halten des brettchens deutlich auf tiefe gehen und man dies dann dem NICK wert im log gegenüberstellen kann
wie gesagt bitte ich um input, was haltet ihr von dem test, und was sollte ich ändern/verbessern
bis dato für mich ein klares zeichen, dass der beschleunigungssensor im code irgendwas verursacht
ich hätte erwartet, dass der NICK-wert beim absolut ebenen schieben des brettchen sich wenn überhaupt nur mini-mini mal verändert
gruss
guido
GUIDO
_________________________________________________________
Too many dicks on the dance floor.
Too many dicks!
Bitte Anmelden oder Registrieren um der Konversation beizutreten.
- IG-Modellbau
-

- Offline
- Moderator
-

- Beiträge: 3786
- Thanks: 2821
Re: ungewöhnliches Verhalten des Assist im Kreiselmode beim Gasgeben
22 Aug. 2020 15:33genial!!!
Wenn das schon auf der Küchenzeile sichtbar ist, warum dann noch das Auto?
Ingmar
Bitte Anmelden oder Registrieren um der Konversation beizutreten.