Bitte ändert euer Passwort!
Im März 2026 wurde das Forum gehackt. Dabei hatten die Angreifer Zugriff auf die Datenbank und somit Zugriff auf eure Passwörter. Auch wenn das Forum kein Passwort im Klartext speichert, können die Angreifer eure Passwörter knacken. Bitte ändert daher dringend euer Passwort für das Forum. Solltet ihr das gleiche Passwort auch an anderer Stelle verwenden, ändert es bitte unbedingt an allen Stellen!
So geht es:
Anleitung Passwort ändern
Torquen mit Assistempfänger, Torqueautomatik
- Jeti-fan
-
 Autor
Autor
- Offline
- Elite Mitglied
-

- Beiträge: 285
- Thanks: 110
Torquen mit Assistempfänger, Torqueautomatik
07 Jan. 2025 12:14 - 07 Jan. 2025 12:39Hier wird eine Torqueautomatik die mit DS , DC Sendern und Rex 6 aufwärts funktioniert, vorgestellt.
Die Programmierung setzt sich aus 4 Pragrammierschritten zusammen:
- Telemetriegeber Status
- Telemetriegeber Nick ab 80 Grad
- Telemetriegeber Vertikalgeschwindigkeit
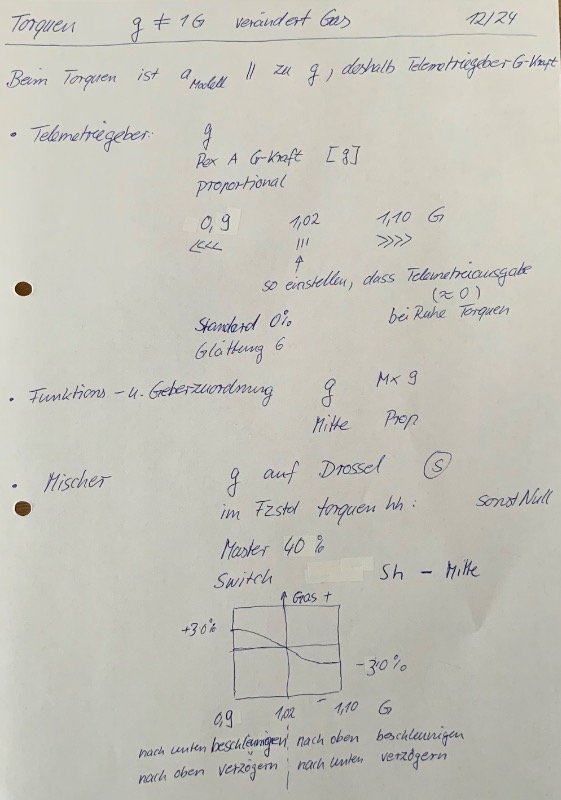
- Telemetriegeber Vertikalbeschleunigung
Die Daten für Status, Nick und Vertikalbeschleunigung liefert der Assistempfänger, die Vertikalgschwindigkeit wir von einem empfindlichen Vario mit Auflösung einige cm/s zur Verfügung gestellt.
Status dient zur Sprachausgabe des Empfängerstatus.
Nick schaltet ab 80 Grad Neigung (0 Grad : Modell fliegt waagrecht) auf Heading Hold mit hoher Empfindlichkeit und Heading Hold auf allen Rudern um.
Die Vertikalgeschwindigkeit beeinflusst über einen Mischer die Drossel. Ist die Vertikalgeschwindigkeit positiv, wird gedrosselt und umgekehrt. Bei 0 cm/s Vertikalgeschwindigkeit wird die Drosselstellung beibehalten.
Die Vertikalbeschleunigung beeinflusst über einen Mischer auch die Drossel. Bei Vertikalbschleunigung größer als 1g (Erdbeschleunigung) wird gedrosselt und umgekehrt.
Die Steuerung ist schalterlos. Es wird alles automatisch durch Telemetriegeber gesteuert, nachdem das Modell in die Gleichgewichtslage beim Torquen gebracht wurde.
Bitte Anmelden oder Registrieren um der Konversation beizutreten.
- cpt_volker
-

- Offline
- Platinum Mitglied
-

- Beiträge: 1020
- Thanks: 424
Re: Torquen mit Assistempfänger, Torqueautomatik
07 Jan. 2025 15:59Das hört sich spannend an.
Hast du das schon in der Praxis ausprobiert? Reicht die Latenz des Gesamtsystems aus, um diesen Regelkreis aufrecht zu erhalten? Schließlich steckt ja bei jedem, aus einer Telemetrie-Messung generierten, Steuerimpuls die Strecke Empfänger/Sender-Sender/Empfänger drin.
Wie komme ich aus dem Hovern wieder raus? Gas geben übersteuert die Regelkette Gasstellung/Vertikalgeschwindigkeit?
Gruß,
Volker
Bitte Anmelden oder Registrieren um der Konversation beizutreten.
- Jeti-fan
-
Autor
- Offline
- Elite Mitglied
-
- Beiträge: 285
- Thanks: 110
Re: Torquen mit Assistempfänger, Torqueautomatik
07 Jan. 2025 16:36 - 07 Jan. 2025 16:37Das Wetter ist schlecht, daher habe ich die Torqueautomatik draußen noch nicht ausprobiert. Im Wohnzimmer mit behütenden Händen nahe am Modell funktioniert das Torquen schon recht gut.
An den Definitionsbereichen für die Telemetriegeber, den Masterwerten der Mischer und den Mischkurven muss ich noch rumfeilen.
Falls Telemetriewerte ausfallen, sind die Standardwerte so eingestellt, dass nichts dramatisches passiert. Die Geberbefehle des Senders übersteuern die Torquautomatik, man kommt jederzeit durch Gasgeben und Nickänderung aus dem Torquen.
Bitte Anmelden oder Registrieren um der Konversation beizutreten.
- Jeti-fan
-
Autor
- Offline
- Elite Mitglied
-
- Beiträge: 285
- Thanks: 110
Re: Torquen mit Assistempfänger, Torqueautomatik
17 Feb. 2025 10:51Bitte Anmelden oder Registrieren um der Konversation beizutreten.
- Jeti-fan
-
Autor
- Offline
- Elite Mitglied
-
- Beiträge: 285
- Thanks: 110
Re: Torquen mit Assistempfänger, Torqueautomatik
17 Feb. 2025 10:51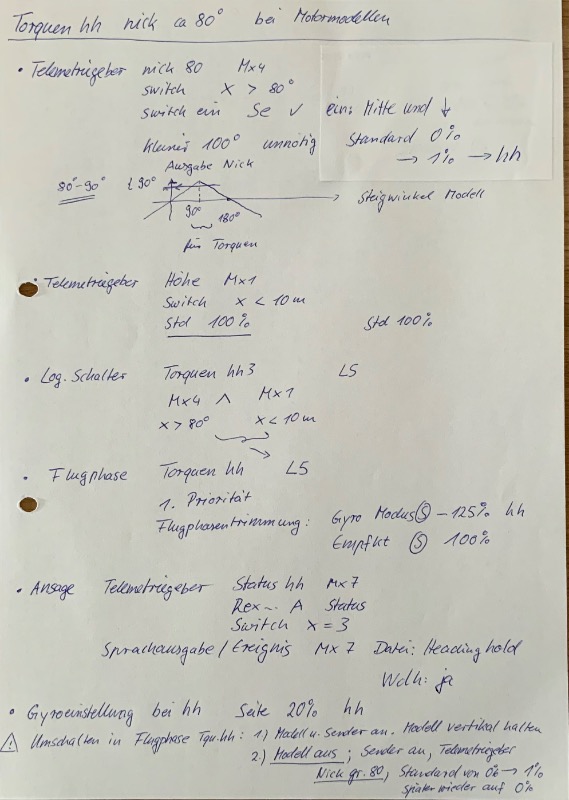
Bitte Anmelden oder Registrieren um der Konversation beizutreten.
- Jeti-fan
-
Autor
- Offline
- Elite Mitglied
-
- Beiträge: 285
- Thanks: 110
Re: Torquen mit Assistempfänger, Torqueautomatik
17 Feb. 2025 10:52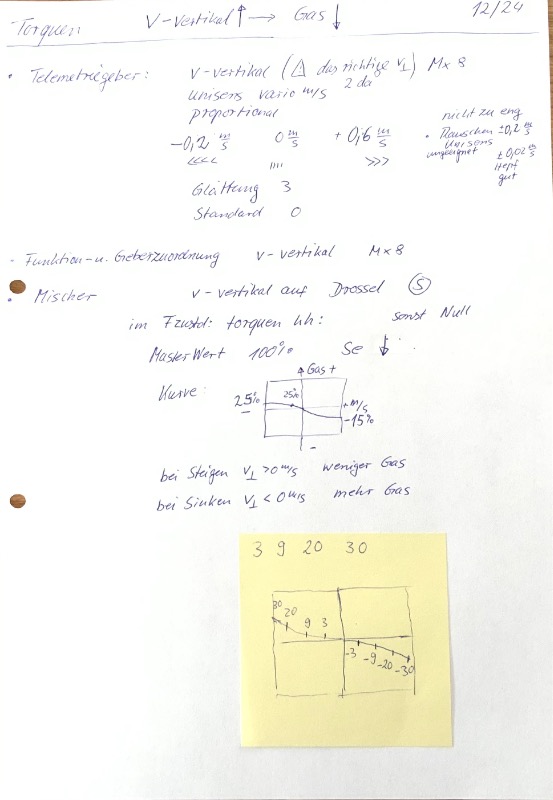
Bitte Anmelden oder Registrieren um der Konversation beizutreten.